
図1.産業用協働ロボット
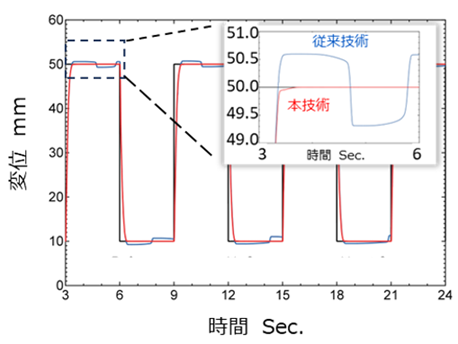
図2.繰り返し変位10mm⇔40mmの結果
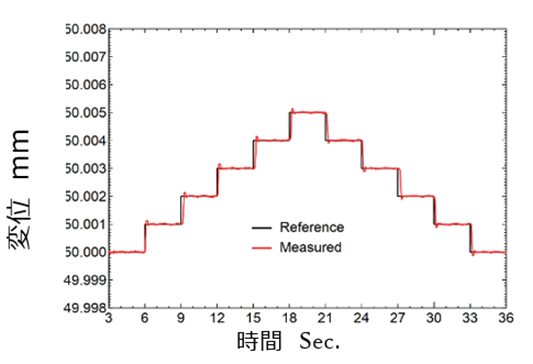
図3.1㎛ステップ送りの結果
| カテゴリー | 工学、機械 |
|---|---|
| キーワード | 空気圧アクチュエータ、精密位置決め制御、協働ロボット、産業応用 |
| 代表研究者 | 髙岩 昌弘 |
| 内容 |
■ 空気圧アクチュエータの高精度位置決め制御技術 研究の概要 <ロボット等の精密作業用途への展開には、任意の高精度位置決め制御がボトルネック> 想定される用途と製品化・事業化イメージ <空気圧制御の本質的特長:高出力/重量や高速稼動を活かしロボット等の高荷重・精密作業分野への展開>
▼徳島大学研究支援・産官学連携センター「研究シーズ」 |